개발자 시선으로 본「로봇 청소기」
페이지 정보
작성자 로보맨 댓글 0건 조회 27,345회 작성일 09-07-08 12:46본문


김성우 (필자) (마이크로소프트웨어)
2004/09/27
2004/09/27
[지디넷코리아]진공 청소기의 원리는 1분에 1만 번 이상 팬을 강하게 회전시켜 호스 속의 공기를 밖으로 뽑아내어서 청소기 내부를 진공 상태로 만드는 것이다. 기계 안의 압력이 줄어들면 흡입력이 생기는데, 대기의 무게 때문에 생기는 바깥쪽의 공기 압력은 기계 안의 압력보다 높게 되고 이로 인해 먼지가 공기와 함께 대기압이 낮은 호스쪽으로 빨려 들어가게 된다.
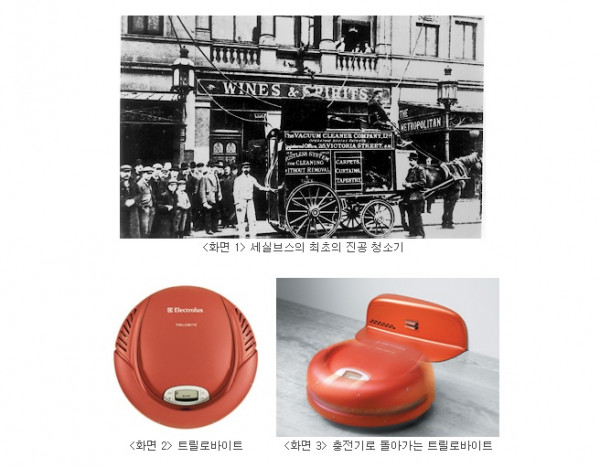
상용화에 성공한 트릴로바이트
세계 최초로 상용화에 성공한 로봇 청소기는 스웨덴의 가전사인 일렉트로룩스의 가정용 로봇 진공 청소기 ‘트릴로바이트(Trilobite)’이다. 이름 그대로 삼엽충처럼 생긴 이 로봇은 현재 230만원 가량에 국내에서 팔리고 있다.
이것은 앞부분에 달린 9개의 초음파 센서를 이용해 장애물을 피하도록 되어 있다. 청소를 시작하면 우선 가장자리를 모두 돌아 공간을 인식한 후 전체를 빠짐없이 돌면서 청소한다. 정말 멋진 기능은 청소가 다 끝나면 충전기로 자동으로 돌아가 충전을 스스로 한다는 것이다. 여러 개의 모터를 사용하기 때문에 배터리는 금방 바닥을 드러내버린다. 로봇 청소기의 최대 난제는 단연 배터리 문제를 해결하는 것인데 트릴로바이트는 충전소로 자동 회귀함으로써 이 문제를 해결하고 있다. 그러나 일반 청소기의 10배나 되는 가격이 최대 단점이다. 그리고 청소하지 않을 곳을 마그네틱 선으로 띠를 둘러야 한다는 것이 조금 귀찮고 미관상 좋지 않은 것도 이후 소개된 로봇 청소기들에 비하면 단점이다.
트릴로바이트가 국내 백화점 등을 통해 실제 판매된 이후 사회에 준 충격은 적지 않았다. 일부는 청소가 잘 되겠냐며 반신반의했지만, 생각보다 만족스럽다는 소문이 심심치 않게 들려왔다. 이에 국내 가전사들과 여러 기업들이 몇 십 억을 들여 개발을 시작했으며 200만원대의 경쟁력 있는 제품을 내놓겠다는 홍보 기사가 자주 등장했다.
국내 최초 로봇 청소기
그런데 곧 출시할 거라는 말이 나온 지 한참 지났는데 상용화된 제품은 LG전자의 로보킹 한대 뿐이다. 로보킹의 개발을 위해 LG는 3년 동안 60억원 이상의 개발 비용과 30여명의 연구 인력을 투입했으며, 총 65건의 특허를 출원 중에 있고 추가로 35건을 출원할 예정이라고 한다. 하지만 소비자가격 249만원이라고 하니 놀랍기 그지없다.
LG는 홈네트워크 및 보안 기능을 추가해 가정에서의 역할을 극대화한 2세대 로봇 청소기를 개발, 올해 중에 출시할 계획이라고 한다. 올해 출시할 2세대 청소기는 휴대폰, PDA 등의 모바일 기기 및 PC와 연계해 집안의 동정을 살필 수 있는 ‘보안 기능’과 이동이 가능한 ‘홈네트워크 서버 기능’ 등을 추가, 기존 홈네트워크 시스템을 한 단계 더 발전시키는 한편 이외에도 ‘바둑판식 청소 기능’과 ‘공기정화 기능’을 부가 기능으로 포함하게 된다고 한다. IT 강국답게 네트워크와 PC를 접목해 경쟁력을 갖추겠다고 하는 포부는 높이 사지만 60억원이나 들여 개발된 1세대 로보킹이 몇 십대 밖에 팔리지 않았다는 후문이 들릴 정도로 저조한 판매량을 기록한 것이다.
로보킹의 기본적인 원리는 일반적인 진공 청소기와 다르지 않으나 브러시를 양쪽에서 올려 필터 쪽으로 흡입하는 방식을 택하고 있다. 원리는 <화면 5>와 같다. 로보킹은 일반 모드, 즉석 모드, 간편 모드의 3가지 청소 모드를 가지고 있다. 일반 모드는 일반적인 청소 형태로, 벽면을 따라(Wall Following) 청소하면서 청소 영역고k 시간을 계산한 다음 주어진 영역을 청소한다. 즉석 모드는 사용자가 방의 크기(Large, Middle, Small)를 지정하면 ‘Wall Following’ 없이 즉시 청소를 시작한다. 간편모드는 과자 부스러기를 흘린 경우처럼 집중적으로 청소할 부분이 있는 경우 반경 1m의 공간을 회전하면서 청소하도록 되어 있다.

이외에 정음 모드가 있는데 일반적으로 진공 청소기는 진공을 만들기 위한 강한 모터를 사용하기 때문에 매우 시끄러운 소음을 낸다. 로봇 청소기도 예외가 아니어서 이 모터 소리가 꽤 시끄럽다. 이 소리를 죽이고 조용히 청소할 수 있는 정음 모드는 칭찬할 만하다. 또한 트릴로바이트와 같이 배터리가 떨어지면 충전소로 회귀할 수 있는 기능도 장점이자 특징이다.
로봇 청소기는 침대 밑이나 장식장 밑 등의 일반 청소기로 청소가 힘들거나 불가능한 곳에서 발군의 청소력을 발휘한다. 그렇지만 큰 머리는 침대 밑에 들어갈 수 없게 만든다. 로보킹이라는 이름에서 주는 컨셉처럼 로봇의 머리를 만들고자 마징가 Z나 메칸더 V를 컨셉으로 디자인을 한 듯한데 높은 머리는 로봇 청소기만의 장점을 살릴 수가 없다.
가격과 성능을 모두 만족시킨 룸바
필자가 미국 횟k인 아이로봇의 ‘룸바(Roomba)’에 대해 들은 것은 트릴로바이트가 언론사를 타고 백화점의 가전제품란에서 움직이는 것을 본 직후 30만원대의 로봇 청소기가 있다는 직장동료를 통해서였다. 허리가 아픈 어머니의 생신 선물로 드리기 위해 30만원 가량을 주고 주문했는데 환갑이 넘으신 어머니가 매우 만족해 한다는 것이었다. 환갑이 넘은 주부도 만족했다는 이 대목에서 대박일 것이라는 느낌이 왔다. 대표적 진공 청소기인 LG 사이킹의 최고급 모델이 30만원 안팎인 것을 감안하면 그리 비싸다는 느낌은 아니었다.
마침 필자의 가족이 이사를 가게 되었고 이사 기념으로 어머니에게 룸바를 선물했다. 얼리어댑터(http://www.earlyadoptor.co.kr)에서 공동구매가 28만원에 구매를 했다. 트릴로바이트와 로보킹이 200~250만원 가량 하는 것을 감안했을 때 포장지를 뜯는 순간까지도 믿을 수 있는 건가 하는 생각이 뇌리에서 떠나지 않았다. 얼리어댑터 사이트 자체에 대한 신뢰도와 정성어린 리뷰 그리고 이미 사용해본 얼리어댑터들의 리플을 보고 결제 버튼을 눌렀다.
포장지를 뜯고 충전시킨 후 동작시켜 본 룸바는 정말 물건(?)이었다. 28만원 짜리라고는 믿어지지 않을 정도로 방과 거실 구석구석을 누비며 성실히 청소해 주었다. 그냥 돌아다니는 건 아닌가라는 생각도 잠시 했으나 청소를 마쳤다는 소리 후에 본 꽉찬 먼지통은 정말 놀라웠다. 룸바만의 최고 장점은 낮은 높이로 인해 침대 밑이나 장식장 밑을 청소할 수 있다는 것이다.
이런 ‘쓸만한 청소기’의 원리를 알아보자. 우선 룸바는 다른 로봇 청소기에 비해 거의 1/10 가격을 자랑한다. 전문지에서는 로봇 청소기 시장이 없다는 기사가 실리지만 정확히 말하면 룸바에 비해 다른 청소기가 가격 경쟁력이 없는 것이다. 안 팔리는 게 당연하다. 다른 로봇 청소기는 기본적으로 공간을 인식하는 센서가 달려 있다. 그리고 저장된 공간을 분석해서 청소 명령을 내리는 복잡한 단계를 거치게 된다. 생각만 해도 환상적인 제어가 들어가야 한다. 비싸지는 게 당연하다. 룸바는 전자벽이 있긴 있지만 이건 예외 사항이므로 공간을 인식하기 위한 센서는 없다고 봐도 좋다. 관찰 결과 룸바는 2가지 청소 알고리즘을 배합해 청소를 한다.
우선 스핀 모드는 처음 청소를 시작할 때 청소할 곳의 가운데에 룸바를 놓고 방크기 버튼을 누르면 청소를 시작하는데 제자리에서 점점 원을 크게 그려 가며 청소를 시작한다(<그림 2>의 1번). 어느 정도 돌았다 싶으면 벽을 향해 돌진한다(<그림 2>의 2번). 벽에 부딪치면 시계방향으로 돌면서 계속 앞으로 전진한다(<그림 2>의 3번). 이런 식으로 벽 가장 자리를 구석구석 청소한다. 일정 시간이 지나면 우수법으로 벽을 부딪치던 반대 왼쪽으로 전진하고 다시 제자리에서 빙글빙글 점차 크게 돌며 청소를 한다. 벽을 인식하는 방법도 매우 간단하다.
룸바 앞에 범퍼가 있어 오른쪽으로 부딪치면 범퍼 뒤에 오른쪽 스위치를 누르게 되어 오른쪽에 벽이 있음을 알고, 범퍼가 왼쪽으로 부딪치면 범퍼 뒤에 왼쪽 스위치가 눌리게 되어 왼쪽에 벽이 있음을 알게 된다(<화면 10>). 그런데 확인 결과 왼쪽 벽과 오른쪽 벽을 구분할 필요가 없다. 1번으로 신호가 들어오건 2번으로 신호가 들어오건 벽에 부딪히면 무조건 왼쪽으로 30도 가량 회전한 뒤에 약간 오른쪽 완만한 원을 그리며 10cm 정도 앞으로 간 후 직진한다. 아주 단순한 알고리즘이지만 어느 구석진 곳에 들어가도 빠져 나올 수 있도록 되어 있다.
룸바에는 총 5개의 모터가 쓰이는 것으로 추측된다. 바퀴 구동을 위해 왼쪽 바퀴와 오른쪽 바퀴에 스텝 모터가 각각 하나씩 두 개가 달려 있다. 머리카락이나 과자 부스러기 등의 잔쓰레기를 쓰는 빗자루를 돌리는 모터와 먼지를 흡입하는 진공을 만들어주는 모터 그리고 둥글게 생긴 모양의 한계상 사각의 모서리 청소가 불가능한데 이 사각의 모서리의 먼지를 안으로 끌어다주는 회전 브러시 모터까지 총 5개이다.
일반 진공 청소기의 경우 콘센트를 통해 전원을 공급받기 때문에 커다란 모터를 써서 강한 흡입을 만들어낼 수 있지만 로봇 청소기의 경우는 배터리를 이용하기 때문에 그만큼 강한 모터를 사용할 수 없다. 그래서 룸바는 빗자루 질과 먼지 처리 두가지 방식을 사용한다. 우선 앞단에서 빗자루가 빙글빙글 돌면서(<그림 4>의 1) 머리카락 과자 부스러기 같은 비교적 입자가 굵은 쓰레기를 쓸어 담는다(<그림 4>의 2). 입자가 작은 먼지는 진공으로 빨아들인다(<그림 4의 3).
진공으로 빨아들인 먼지 바람을 <그림 4>의 4의 필터를 통과시킴으로써 먼지를 걸러내도록 되어 있다. <그림 4>의 측면도에서는 공기흡입 모터가 나오지 않았는데 <그림 13>의 공기 흡입구 부분에 작은 모터가 달려 있다. <화면 11>의 3과 4는 <그림 1>의 원리가 그대로 적용되어 있다. 큰 입자는 빗자루질로 청소를 하므로 상대적으로 작은 입자를 빨아들일 수 있는 작은 공기압만을 만들면 되기 때문에 작은 모터로도 청소 효과를 낸다. 작은 모터로 진공 효과를 내기 위해 진공 흡입 부분의 통로가 매우 얇게 되어 있다.
이렇게 앞단에서 큰 쓰레기를 거르고 뒷단에서 먼지를 거르는 2단 방식으로 청소하면서 <그림 3>의 알고리즘을 20~30분 정도 반복하면 구석구석 깨끗이 청소가 된다. <그림 3>의 룸바의 방향을 정하는 알고리즘 중에 30도 좌로 회전하고 완만한 각도로 우측 앞으로 가는 부분은 구석진 곳에 들어가 우측 부딪침이 많은 경우 좌회전을 하기도 하는데 골고루 청소하기 위해 어느 정도 무질서도를 넣은 듯하다. 처음 본 사람들은 “뭐 이런 장난감 같은 게 청소가 얼마나 되겠어”라고 하지만 이 무질서 높은 알고리즘으로 20~30분 작동시키면 대부분의 구역을 구석구석 돌게 되고 먼지 집진기에 수북이 쌓인 먼지를 보면 누구나 감탄을 금하지 못한다.
<화면 11>을 보면 알겠지만 바퀴가 코란도 같은 4륜 구동차를 오프로드 머신으로 튜닝할 때 쓰는 머슬 타이어를 줄여 놓은 모양이어서 수건 카페트 등의 어지간한 장애물은 막힘없이 지나가며, 몸체가 지면에서 1.5cm 가량 떨어져 있어 일반 아파트나 빌라 등의 턱은 가볍게 넘어다닌다. 범퍼 좌우의 하단에 센서가 있는데 낭떠러지를 인식하는 센서로 보인다. 문을 닫아 두지 않아도 밖으로 나가지 않고 안쪽으로 돌아와 청소하는 것을 보면 기특하기까지 하다.
단순 명료함의 강력함
필자가 다니던 대학교에서 가장 허름한 건물인 구질구질한 공학관 꼭대기 5층 가장 구석, 마이크로 마우스를 전문으로 만들던 H학회가 있었다. 이들은 실력이 엄청나서 당시 국내 대회는 물론 일본까지 진출해 우승을 휩쓸고 있었다. 이 학회 출신 OB들이 1998년 로봇 월드컵에서 우승할 정도니 그 기세와 위용이 대단했다.
이런 슈퍼스타 바로 옆방을 쓰고 있던 필자의 학회는 전산실이나 지키며 윈도우나 설치하는 그냥 그런 모임으로 취급받는 게 당연했다. 1998년 IMF가 터지고 학회의 활로를 모색하던 중 우승은 아니어도 마이크로 마우스가 뭔지 만들어 보자는 오기 반 호기심 반으로 직접 마이크로 마우스를 만들어 보기로 했다. 수소문해서 회로도를 구하고 청계천에서 바퀴 깎고 스텝 모터 구매하고 어느 정도 틀이 잡혔을 때, 마이크로 마우스에 대한 혁신적인 아이디어가 하나 떠올랐다.
필자가 생각한 것은 카메라를 마이크로 마우스 위에 달고 출발하기 전 미로를 인식해 최단거리를 계산한 뒤에 시행착오 없이 단번에 목표지점에 가는 방식이었다. 제작에 들어가기 전에 H학회에 소속되어 있는 동기생에게 미로를 영상으로 인식해서 최단거리를 재면 어떻겠냐고 슬며시 물어 보았다. 그 질문에 대해 생각할 가치도 없다는 듯이 바로 내뱉은 대답은 힘들다는 것이었다. 이미 그런 시도들은 있었지만 오차율이 크고 장비들이 무겁기 때문에 실제 속도가 나지 않아서 실전에서는 사용하지 않는다고 했다.
28만원 짜리 룸바와 200만원대의 다른 로봇 청소기를 보면 이때의 에피소드가 생각난다. 멋진 알고리즘이 이상적이지만 실제 필드에서는 경쟁력이 없을 수 있다. 물론 그 시도가 더 멋진 것이 나오기 위한 발판이 될 수는 있지만 현실성과 사용자들의 시장을 잘 읽어야 한다는 것이다.
다른 청소기에 비해 룸바의 칭찬을 많이 했는데 그것은 구매가 가능한 가격이기 때문이다. 일반 청소기와 비교해도 가격 경쟁력이 있다. 최근에는 리모콘이 달린 룸바 프로엘리트 버전이 출시됐다. 색깔도 회색에서 자보색으로 무척이나 고급스럽다. 필자가 구매할 당시 공동 구매가가 28만원이었지만 지금은 오히려 가격이 많이 올라 인터넷 쇼핑몰 등에서 40만원 이상으로 팔리고 있다.
룸바의 최대 단점은 배터리 문제에 속수무책이라는 것이다. 최초 구입시 1시간 가량은 가던 것이 6개월 가량 사용한 현재는 20분밖에는 사용할 수가 없다. 이래서야 방 하나 청소하기 전에 배터리가 바닥을 드러낸다. 이 가격에 충전기로 회귀하는 기능을 기대할 수는 없고 8만원 가량하는 새 니켈망간 배터리를 사야 하는지 심각히 고려 중이다. 6개월마다 8만원씩 들어가는 유지비가 룸바의 최대 단점이자 해결해야 할 과제이다. 저렴하게 자동 충전될 수 있는 시스템을 한번 기다려 보자.
룸바의 경우 iRobot사로부터 자료를 받은 것도 아니고 국내 딜러를 통해 자료를 받은 것도 아니며 관찰과 직접 분해해서 얻은 내용들이라 완벽하지는 않을 수 있다. 독자들이나 관련 분야에 있는 분들의 정정이나 추가 사항이 있어 알려주면 정정, 보강하도록 하겠다. @
 |
| <그림 1> 진공 청소기의 원리 |
상용화에 성공한 트릴로바이트
세계 최초로 상용화에 성공한 로봇 청소기는 스웨덴의 가전사인 일렉트로룩스의 가정용 로봇 진공 청소기 ‘트릴로바이트(Trilobite)’이다. 이름 그대로 삼엽충처럼 생긴 이 로봇은 현재 230만원 가량에 국내에서 팔리고 있다.
 |
|
<화면 1> 세실브스의 최초의 진공 청소기
|
트릴로바이트가 국내 백화점 등을 통해 실제 판매된 이후 사회에 준 충격은 적지 않았다. 일부는 청소가 잘 되겠냐며 반신반의했지만, 생각보다 만족스럽다는 소문이 심심치 않게 들려왔다. 이에 국내 가전사들과 여러 기업들이 몇 십 억을 들여 개발을 시작했으며 200만원대의 경쟁력 있는 제품을 내놓겠다는 홍보 기사가 자주 등장했다.
국내 최초 로봇 청소기
그런데 곧 출시할 거라는 말이 나온 지 한참 지났는데 상용화된 제품은 LG전자의 로보킹 한대 뿐이다. 로보킹의 개발을 위해 LG는 3년 동안 60억원 이상의 개발 비용과 30여명의 연구 인력을 투입했으며, 총 65건의 특허를 출원 중에 있고 추가로 35건을 출원할 예정이라고 한다. 하지만 소비자가격 249만원이라고 하니 놀랍기 그지없다.
LG는 홈네트워크 및 보안 기능을 추가해 가정에서의 역할을 극대화한 2세대 로봇 청소기를 개발, 올해 중에 출시할 계획이라고 한다. 올해 출시할 2세대 청소기는 휴대폰, PDA 등의 모바일 기기 및 PC와 연계해 집안의 동정을 살필 수 있는 ‘보안 기능’과 이동이 가능한 ‘홈네트워크 서버 기능’ 등을 추가, 기존 홈네트워크 시스템을 한 단계 더 발전시키는 한편 이외에도 ‘바둑판식 청소 기능’과 ‘공기정화 기능’을 부가 기능으로 포함하게 된다고 한다. IT 강국답게 네트워크와 PC를 접목해 경쟁력을 갖추겠다고 하는 포부는 높이 사지만 60억원이나 들여 개발된 1세대 로보킹이 몇 십대 밖에 팔리지 않았다는 후문이 들릴 정도로 저조한 판매량을 기록한 것이다.
로보킹의 기본적인 원리는 일반적인 진공 청소기와 다르지 않으나 브러시를 양쪽에서 올려 필터 쪽으로 흡입하는 방식을 택하고 있다. 원리는 <화면 5>와 같다. 로보킹은 일반 모드, 즉석 모드, 간편 모드의 3가지 청소 모드를 가지고 있다. 일반 모드는 일반적인 청소 형태로, 벽면을 따라(Wall Following) 청소하면서 청소 영역고k 시간을 계산한 다음 주어진 영역을 청소한다. 즉석 모드는 사용자가 방의 크기(Large, Middle, Small)를 지정하면 ‘Wall Following’ 없이 즉시 청소를 시작한다. 간편모드는 과자 부스러기를 흘린 경우처럼 집중적으로 청소할 부분이 있는 경우 반경 1m의 공간을 회전하면서 청소하도록 되어 있다.
로봇 청소기는 침대 밑이나 장식장 밑 등의 일반 청소기로 청소가 힘들거나 불가능한 곳에서 발군의 청소력을 발휘한다. 그렇지만 큰 머리는 침대 밑에 들어갈 수 없게 만든다. 로보킹이라는 이름에서 주는 컨셉처럼 로봇의 머리를 만들고자 마징가 Z나 메칸더 V를 컨셉으로 디자인을 한 듯한데 높은 머리는 로봇 청소기만의 장점을 살릴 수가 없다.
가격과 성능을 모두 만족시킨 룸바
필자가 미국 횟k인 아이로봇의 ‘룸바(Roomba)’에 대해 들은 것은 트릴로바이트가 언론사를 타고 백화점의 가전제품란에서 움직이는 것을 본 직후 30만원대의 로봇 청소기가 있다는 직장동료를 통해서였다. 허리가 아픈 어머니의 생신 선물로 드리기 위해 30만원 가량을 주고 주문했는데 환갑이 넘으신 어머니가 매우 만족해 한다는 것이었다. 환갑이 넘은 주부도 만족했다는 이 대목에서 대박일 것이라는 느낌이 왔다. 대표적 진공 청소기인 LG 사이킹의 최고급 모델이 30만원 안팎인 것을 감안하면 그리 비싸다는 느낌은 아니었다.
마침 필자의 가족이 이사를 가게 되었고 이사 기념으로 어머니에게 룸바를 선물했다. 얼리어댑터(http://www.earlyadoptor.co.kr)에서 공동구매가 28만원에 구매를 했다. 트릴로바이트와 로보킹이 200~250만원 가량 하는 것을 감안했을 때 포장지를 뜯는 순간까지도 믿을 수 있는 건가 하는 생각이 뇌리에서 떠나지 않았다. 얼리어댑터 사이트 자체에 대한 신뢰도와 정성어린 리뷰 그리고 이미 사용해본 얼리어댑터들의 리플을 보고 결제 버튼을 눌렀다.
 |
| <화면 9> 집안의 귀여움을 독차지하고 있는 로봇 청소기 룸바 |
포장지를 뜯고 충전시킨 후 동작시켜 본 룸바는 정말 물건(?)이었다. 28만원 짜리라고는 믿어지지 않을 정도로 방과 거실 구석구석을 누비며 성실히 청소해 주었다. 그냥 돌아다니는 건 아닌가라는 생각도 잠시 했으나 청소를 마쳤다는 소리 후에 본 꽉찬 먼지통은 정말 놀라웠다. 룸바만의 최고 장점은 낮은 높이로 인해 침대 밑이나 장식장 밑을 청소할 수 있다는 것이다.
이런 ‘쓸만한 청소기’의 원리를 알아보자. 우선 룸바는 다른 로봇 청소기에 비해 거의 1/10 가격을 자랑한다. 전문지에서는 로봇 청소기 시장이 없다는 기사가 실리지만 정확히 말하면 룸바에 비해 다른 청소기가 가격 경쟁력이 없는 것이다. 안 팔리는 게 당연하다. 다른 로봇 청소기는 기본적으로 공간을 인식하는 센서가 달려 있다. 그리고 저장된 공간을 분석해서 청소 명령을 내리는 복잡한 단계를 거치게 된다. 생각만 해도 환상적인 제어가 들어가야 한다. 비싸지는 게 당연하다. 룸바는 전자벽이 있긴 있지만 이건 예외 사항이므로 공간을 인식하기 위한 센서는 없다고 봐도 좋다. 관찰 결과 룸바는 2가지 청소 알고리즘을 배합해 청소를 한다.
 |
| <그림 2> 룸바의 청소 궤적 |
우선 스핀 모드는 처음 청소를 시작할 때 청소할 곳의 가운데에 룸바를 놓고 방크기 버튼을 누르면 청소를 시작하는데 제자리에서 점점 원을 크게 그려 가며 청소를 시작한다(<그림 2>의 1번). 어느 정도 돌았다 싶으면 벽을 향해 돌진한다(<그림 2>의 2번). 벽에 부딪치면 시계방향으로 돌면서 계속 앞으로 전진한다(<그림 2>의 3번). 이런 식으로 벽 가장 자리를 구석구석 청소한다. 일정 시간이 지나면 우수법으로 벽을 부딪치던 반대 왼쪽으로 전진하고 다시 제자리에서 빙글빙글 점차 크게 돌며 청소를 한다. 벽을 인식하는 방법도 매우 간단하다.
룸바 앞에 범퍼가 있어 오른쪽으로 부딪치면 범퍼 뒤에 오른쪽 스위치를 누르게 되어 오른쪽에 벽이 있음을 알고, 범퍼가 왼쪽으로 부딪치면 범퍼 뒤에 왼쪽 스위치가 눌리게 되어 왼쪽에 벽이 있음을 알게 된다(<화면 10>). 그런데 확인 결과 왼쪽 벽과 오른쪽 벽을 구분할 필요가 없다. 1번으로 신호가 들어오건 2번으로 신호가 들어오건 벽에 부딪히면 무조건 왼쪽으로 30도 가량 회전한 뒤에 약간 오른쪽 완만한 원을 그리며 10cm 정도 앞으로 간 후 직진한다. 아주 단순한 알고리즘이지만 어느 구석진 곳에 들어가도 빠져 나올 수 있도록 되어 있다.
 |
| <화면 10> 룸바의 벽인식 |
 |
| <그림 3> 룸바 알고리즘 |
룸바에는 총 5개의 모터가 쓰이는 것으로 추측된다. 바퀴 구동을 위해 왼쪽 바퀴와 오른쪽 바퀴에 스텝 모터가 각각 하나씩 두 개가 달려 있다. 머리카락이나 과자 부스러기 등의 잔쓰레기를 쓰는 빗자루를 돌리는 모터와 먼지를 흡입하는 진공을 만들어주는 모터 그리고 둥글게 생긴 모양의 한계상 사각의 모서리 청소가 불가능한데 이 사각의 모서리의 먼지를 안으로 끌어다주는 회전 브러시 모터까지 총 5개이다.
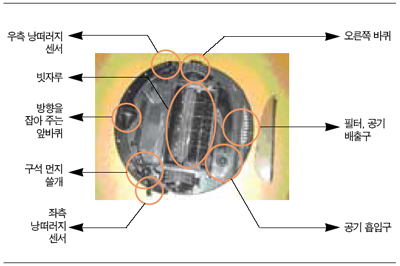 |
| <화면 11> 룸바의 뒷모습 |
일반 진공 청소기의 경우 콘센트를 통해 전원을 공급받기 때문에 커다란 모터를 써서 강한 흡입을 만들어낼 수 있지만 로봇 청소기의 경우는 배터리를 이용하기 때문에 그만큼 강한 모터를 사용할 수 없다. 그래서 룸바는 빗자루 질과 먼지 처리 두가지 방식을 사용한다. 우선 앞단에서 빗자루가 빙글빙글 돌면서(<그림 4>의 1) 머리카락 과자 부스러기 같은 비교적 입자가 굵은 쓰레기를 쓸어 담는다(<그림 4>의 2). 입자가 작은 먼지는 진공으로 빨아들인다(<그림 4의 3).
진공으로 빨아들인 먼지 바람을 <그림 4>의 4의 필터를 통과시킴으로써 먼지를 걸러내도록 되어 있다. <그림 4>의 측면도에서는 공기흡입 모터가 나오지 않았는데 <그림 13>의 공기 흡입구 부분에 작은 모터가 달려 있다. <화면 11>의 3과 4는 <그림 1>의 원리가 그대로 적용되어 있다. 큰 입자는 빗자루질로 청소를 하므로 상대적으로 작은 입자를 빨아들일 수 있는 작은 공기압만을 만들면 되기 때문에 작은 모터로도 청소 효과를 낸다. 작은 모터로 진공 효과를 내기 위해 진공 흡입 부분의 통로가 매우 얇게 되어 있다.
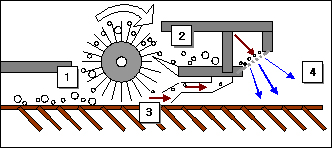 |
| <그림 4> 룸바 청소의 원리 |
이렇게 앞단에서 큰 쓰레기를 거르고 뒷단에서 먼지를 거르는 2단 방식으로 청소하면서 <그림 3>의 알고리즘을 20~30분 정도 반복하면 구석구석 깨끗이 청소가 된다. <그림 3>의 룸바의 방향을 정하는 알고리즘 중에 30도 좌로 회전하고 완만한 각도로 우측 앞으로 가는 부분은 구석진 곳에 들어가 우측 부딪침이 많은 경우 좌회전을 하기도 하는데 골고루 청소하기 위해 어느 정도 무질서도를 넣은 듯하다. 처음 본 사람들은 “뭐 이런 장난감 같은 게 청소가 얼마나 되겠어”라고 하지만 이 무질서 높은 알고리즘으로 20~30분 작동시키면 대부분의 구역을 구석구석 돌게 되고 먼지 집진기에 수북이 쌓인 먼지를 보면 누구나 감탄을 금하지 못한다.
<화면 11>을 보면 알겠지만 바퀴가 코란도 같은 4륜 구동차를 오프로드 머신으로 튜닝할 때 쓰는 머슬 타이어를 줄여 놓은 모양이어서 수건 카페트 등의 어지간한 장애물은 막힘없이 지나가며, 몸체가 지면에서 1.5cm 가량 떨어져 있어 일반 아파트나 빌라 등의 턱은 가볍게 넘어다닌다. 범퍼 좌우의 하단에 센서가 있는데 낭떠러지를 인식하는 센서로 보인다. 문을 닫아 두지 않아도 밖으로 나가지 않고 안쪽으로 돌아와 청소하는 것을 보면 기특하기까지 하다.
| ||||||||||
| ||||||||||
|
단순 명료함의 강력함
필자가 다니던 대학교에서 가장 허름한 건물인 구질구질한 공학관 꼭대기 5층 가장 구석, 마이크로 마우스를 전문으로 만들던 H학회가 있었다. 이들은 실력이 엄청나서 당시 국내 대회는 물론 일본까지 진출해 우승을 휩쓸고 있었다. 이 학회 출신 OB들이 1998년 로봇 월드컵에서 우승할 정도니 그 기세와 위용이 대단했다.
이런 슈퍼스타 바로 옆방을 쓰고 있던 필자의 학회는 전산실이나 지키며 윈도우나 설치하는 그냥 그런 모임으로 취급받는 게 당연했다. 1998년 IMF가 터지고 학회의 활로를 모색하던 중 우승은 아니어도 마이크로 마우스가 뭔지 만들어 보자는 오기 반 호기심 반으로 직접 마이크로 마우스를 만들어 보기로 했다. 수소문해서 회로도를 구하고 청계천에서 바퀴 깎고 스텝 모터 구매하고 어느 정도 틀이 잡혔을 때, 마이크로 마우스에 대한 혁신적인 아이디어가 하나 떠올랐다.
필자가 생각한 것은 카메라를 마이크로 마우스 위에 달고 출발하기 전 미로를 인식해 최단거리를 계산한 뒤에 시행착오 없이 단번에 목표지점에 가는 방식이었다. 제작에 들어가기 전에 H학회에 소속되어 있는 동기생에게 미로를 영상으로 인식해서 최단거리를 재면 어떻겠냐고 슬며시 물어 보았다. 그 질문에 대해 생각할 가치도 없다는 듯이 바로 내뱉은 대답은 힘들다는 것이었다. 이미 그런 시도들은 있었지만 오차율이 크고 장비들이 무겁기 때문에 실제 속도가 나지 않아서 실전에서는 사용하지 않는다고 했다.
28만원 짜리 룸바와 200만원대의 다른 로봇 청소기를 보면 이때의 에피소드가 생각난다. 멋진 알고리즘이 이상적이지만 실제 필드에서는 경쟁력이 없을 수 있다. 물론 그 시도가 더 멋진 것이 나오기 위한 발판이 될 수는 있지만 현실성과 사용자들의 시장을 잘 읽어야 한다는 것이다.
다른 청소기에 비해 룸바의 칭찬을 많이 했는데 그것은 구매가 가능한 가격이기 때문이다. 일반 청소기와 비교해도 가격 경쟁력이 있다. 최근에는 리모콘이 달린 룸바 프로엘리트 버전이 출시됐다. 색깔도 회색에서 자보색으로 무척이나 고급스럽다. 필자가 구매할 당시 공동 구매가가 28만원이었지만 지금은 오히려 가격이 많이 올라 인터넷 쇼핑몰 등에서 40만원 이상으로 팔리고 있다.
룸바의 최대 단점은 배터리 문제에 속수무책이라는 것이다. 최초 구입시 1시간 가량은 가던 것이 6개월 가량 사용한 현재는 20분밖에는 사용할 수가 없다. 이래서야 방 하나 청소하기 전에 배터리가 바닥을 드러낸다. 이 가격에 충전기로 회귀하는 기능을 기대할 수는 없고 8만원 가량하는 새 니켈망간 배터리를 사야 하는지 심각히 고려 중이다. 6개월마다 8만원씩 들어가는 유지비가 룸바의 최대 단점이자 해결해야 할 과제이다. 저렴하게 자동 충전될 수 있는 시스템을 한번 기다려 보자.
룸바의 경우 iRobot사로부터 자료를 받은 것도 아니고 국내 딜러를 통해 자료를 받은 것도 아니며 관찰과 직접 분해해서 얻은 내용들이라 완벽하지는 않을 수 있다. 독자들이나 관련 분야에 있는 분들의 정정이나 추가 사항이 있어 알려주면 정정, 보강하도록 하겠다. @
이글은 ZDnet korea 의 기사를 발췌한 것입니다.
http://www.zdnet.co.kr/techupdate/lecture/etc/0,39024989,39130416,00.htm
[이 게시물은 로보맨님에 의해 2013-09-14 22:27:39 robo_컬럼&탐방에서 이동 됨]
[이 게시물은 로보맨님에 의해 2013-09-14 22:54:45 리뷰에서 이동 됨]http://www.zdnet.co.kr/techupdate/lecture/etc/0,39024989,39130416,00.htm
댓글목록
등록된 댓글이 없습니다.